
공동활용장비

- 장비찾기
- 공동활용장비
- Performance Test System of Robot’s Driving
- 로봇주행성능평가시스템
- i-Tube No. 1611-F-0254
- NTIS No NFEC-2017-06-238164
-
설치기관
로봇기반디지털본부
(한국로봇산업진흥원)

- 주소 대구광역시 북구 노원로 77 (노원동3가)
- 담당자 류병현 (T. 053-210-9624 )
- 매뉴얼
-
온라인* 본 장비는 온라인 예약이 불가하오니 장비사용 예약과 관련해서는
예약가능여부
장비 보유기관에 직접 문의 주시기 바랍니다. (장비 예약은 Zeus 시스템에서 회원가입후 예약가능)
장비정보
-
제작사
보임테크놀러지(주), 주식회사 이화건설
-
모델 명
로봇주행성능평가 시스템
내용연수10년
-
구분
주장비
용도시험
-
표준 분류
물리적 측정장비 > 달리 분류되지 않는 물리적 측정장비 >
장비활용범위공동활용허용
-
취득일
2016-11-22
취득금액3,110,000,000원
- 인증정보
- 기능
- 장비 상세설명
이용안내
-
사용형태
기관의뢰
설치형태고정형
-
사용료 형태
건별
장비 사용료388,000원
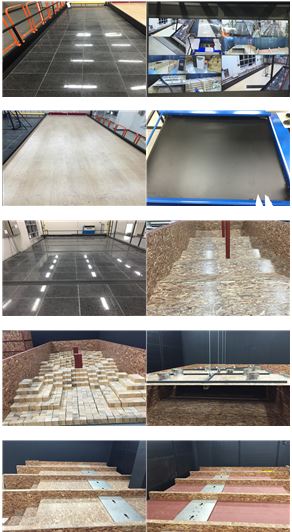
장비설명
로봇주행성능평가시스템은 바닥 환경이 다른 조건에서의 주행성능, 경사로, 주행내구성, 비정형주행 등의 시험‧평가를 통해 주행플랫폼 기반의 로봇 제품의 성능, 신뢰성, 안전성 등을 평가‧검증하는 장비입니다.
장비 구성 및 성능
◦ 정형 TYPE 주행로
- 주행성능시험로
․ SIZE :11,000(L)×2,500(W)×700(H)
․ 바닥교체가능 : 대리석, 아스콘, 송판, 카펫 등
․ test table 변경(전자식 자동)
․ 구간별 속도 변화량 측정(±0.2m/s)
․ 실시간 직진도 측청(0.5m당 ±1°)
․ 추측항법을 통한 위치 측정, 제동거리 측정
․ 지정경로와 실운행경로에 대한 비교데이터(스크린)
- 내구성시험로
․ SIZE : 6,500(W)×2,000(L)×700(H)
․ 속도측정 : 1m/s(min)~14m/s(Max)
․ 모션 캡처 : ± 0.1mm
․ 드럼타입, 무한궤도타입
․ 로봇 전원연결 기능 (파워서플라이 Resolution 0.05V)
․ 시간(min)별 로봇 속도 측정
․ 최대운행시간 720시간 작동 가능
(신뢰성Bx Life 적용)
․ 로봇 속도변화에 따른 속도자동제어기능
․ 로봇 발열 실시간 측정기능
- 가변시험로
․ SIZE : 11,000(L)×4,000(W)×700(H)
․ 바닥교체가능 : 대리석, 아스콘, 송판, 카펫 등
․ 각도분해능 : ±1°, 최대각도 : 30°
․ 실시간 각도변화에 따른 로봇 주행능력 실시간 저장
․ 각도 변화에 따른 로봇 등판속도 측정
․ 등판각도 주행에 대한 배터리 소모량 측정
․ 각도 변화에서의 로봇 제동거리 측정
- 공통사항(정형 TYPE 주행로)
․ 위치 추적용 이동형 카메라 부착 (실시간 영상데이터 전송)
․ 속도 측정 : 최대 1m/s
․ 위치 인식 : ±0.1mm, 직진도 측정 : ± 1°
․ 이동 경로 : 정확도 ±10mm
․ 최대 허용 하중 500kg(로봇무게)
․ 주행시 이동경로에 대한 경로측정 및 실시간 영상 저장
* 해상도 최대 1280×720이상
․ 이동로봇 안전을 고려한 Fence
․ 데이터 통합관리 시스템 구축
․ 시험로 각 모듈별 부품교체 가능
◦ 비정형 TYPE 주행로(ASTM 주행 평가 방법)
- Mobility Terrains crossing pitch /roll ramps(15〫 ) Symmetric Step fields
․ 암실기능(조명이 없는 초저도 촬영)
․ 로봇 추적용 카메라 실시간 촬영
․ 로봇 위치 실시간 모니터링 기능(컴퓨터)
․ 시료 로봇과 무선 통신기능
- E2804 Mobility Obstacles(Stairs) Landings
(3〫0〬~45〬, Wood/Metal, wet)
․ 높이 각도 별 총 8개 제작
․ 로봇 추적용 카메라 실시간 촬영
- Manipulation Directed Perception Tasks : Open Access
- Human_System Interaction Search Tasks
- 공통사항
카메라시스템
․ 로봇 시험구간 이동식 광역촬영 및 녹화
․ 슬라브 레일설치로 다양한 원격 촬영
․ 최첨단 카메라 레일 시스템
․ 돌리 자동 충전 시스템, 대형 모자이크 비디오 월
․ 최대 255대 카메라 동시 제어
․ 백업서버, 방수기능
․ 야간 또는 조명이 없는 초저도 촬영
안전시스템
․ 국제보호 등급 제품
․ 국제 전기표준회의기구(IEC) 규격 제품
․ 안전 Category 3등급, IEC/EN 61508(SIL 2) 충족
․ IP65 ~ 67, 별도 안전 Bus 시스템
․ 외부 Monitoring, 최대 19m 거리 감지
서울특별시 강남구 테헤란로 305 한국기술센터 2~7, 14층, 16~17층, 21층
i-Tube 대표문의 : 1811-9126 / KIAT 대표 콜센터 : 02-6009-3000